

What is the efficient gait?
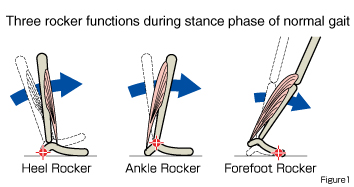 In stance phase of normal gait, the body rotates in the forward direction around the foot touching the ground. The rotation center is transferred to the heel, ankle joint, and forefoot in the beginning, middle, and end of stance phase, respectively. This rotation is similar to a movement of a rocking chair, thus called rocker function during gait (J.Perry,1992).
In stance phase of normal gait, the body rotates in the forward direction around the foot touching the ground. The rotation center is transferred to the heel, ankle joint, and forefoot in the beginning, middle, and end of stance phase, respectively. This rotation is similar to a movement of a rocking chair, thus called rocker function during gait (J.Perry,1992).
(Figure 1)
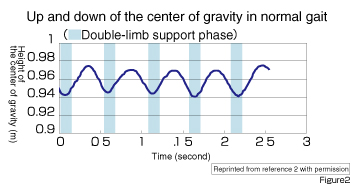 With these three rocker functions, the center of gravity is elevated in single-limb support phase and is depressed in double-limb support phase. This displacement is like a sine curve. This sine-curve-like displacement of the center of gravity provides efficient gait by utilizing gravity.
With these three rocker functions, the center of gravity is elevated in single-limb support phase and is depressed in double-limb support phase. This displacement is like a sine curve. This sine-curve-like displacement of the center of gravity provides efficient gait by utilizing gravity.
(Figure 2)
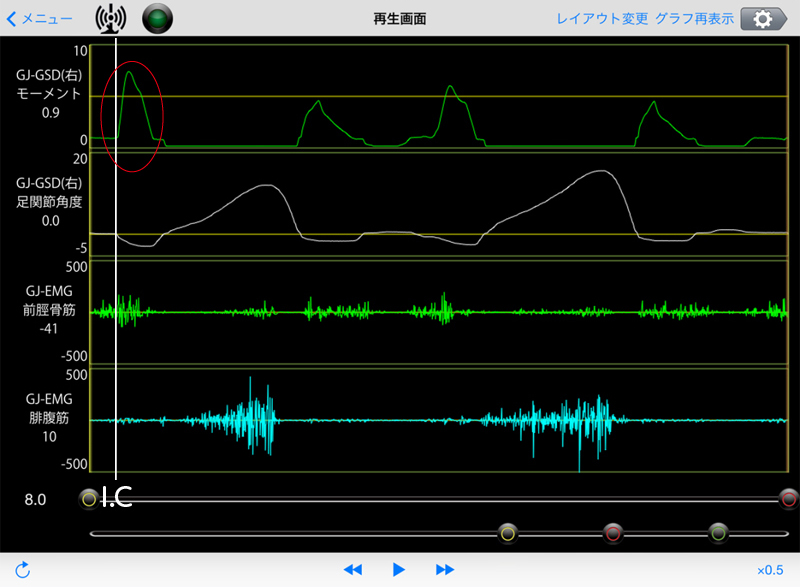
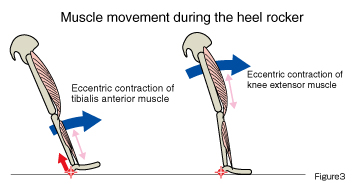 The heel rocker plays a key role of transforming the force generated by the fall of body weight with the gravity into forward momentum.
The heel rocker plays a key role of transforming the force generated by the fall of body weight with the gravity into forward momentum.
The ground-reaction force generated on the heel at the initial contact is applied in the plantar flexion direction. At this time, eccentric contraction of a series of dorsal flexion muscles at the ankle joint including tibialis anterior muscle applies a brake to plantar flexion while moving the lower leg forward.
(Figure 3)
At the same time, a series of knee extensor muscles also contract eccentrically to move the femur forward. Thus, humans transform the force generated with gravity into forward momentum to walk.
In stance phase of normal gait, the body rotates in the forward direction around the foot touching the ground. The rotation center is transferred to the heel, ankle joint, and forefoot in the beginning, middle, and end of stance phase, respectively. This rotation is similar to a movement of a rocking chair, thus called rocker function during gait (J.Perry,1992).(Figure 1)
With these three rocker functions, the center of gravity is elevated in single-limb support phase and is depressed in double-limb support phase. This displacement is like a sine curve. This sine-curve-like displacement of the center of gravity provides efficient gait by utilizing gravity.(Figure 2)
The heel rocker plays a key role of transforming the force generated by the fall of body weight with the gravity into forward momentum.The ground-reaction force generated on the heel at the initial contact is applied in the plantar flexion direction. At this time, eccentric contraction of a series of dorsal flexion muscles at the ankle joint including tibialis anterior muscle applies a brake to plantar flexion while moving the lower leg forward.
(Figure 3)
At the same time, a series of knee extensor muscles also contract eccentrically to move the femur forward. Thus, humans transform the force generated with gravity into forward momentum to walk.

Technology 1: “Momentary strong force” to support the heel rocker
 The body falls from the height of about 1 cm during terminal swing phase.
The body falls from the height of about 1 cm during terminal swing phase.
The heel rocker transforms this downward force into forward momentum.
The ground-reaction force generated on the heel at the initial contact is applied in the plantar flexion direction. Specifically, it is known that about 60% of the body weight is applied during 0.1 second from the initial contact.
Therefore, “momentary strong force” is required to apply a brake. The hydraulic damper achieves it. If using an elastic body e.g. a spring, which is often used in traditional orthosis to generate the braking force, a large spring is required and it interferes the movement of the ankle joint.
GS is the only orthosis in the world that can support the heel rocker without interference with the movement of the ankle joint by generating momentary strong force.
 The body falls from the height of about 1 cm during terminal swing phase.
The body falls from the height of about 1 cm during terminal swing phase. The heel rocker transforms this downward force into forward momentum.
The ground-reaction force generated on the heel at the initial contact is applied in the plantar flexion direction. Specifically, it is known that about 60% of the body weight is applied during 0.1 second from the initial contact.
Therefore, “momentary strong force” is required to apply a brake. The hydraulic damper achieves it. If using an elastic body e.g. a spring, which is often used in traditional orthosis to generate the braking force, a large spring is required and it interferes the movement of the ankle joint.
GS is the only orthosis in the world that can support the heel rocker without interference with the movement of the ankle joint by generating momentary strong force.
Technology 2: Braking force without interference with gait
The hydraulic damper incorporated in GS does not generate restoring force unlike elastic body. GS generates a braking force only in the plantar flexion direction.
This provides smooth anterior movement of the body after the ankle rocker.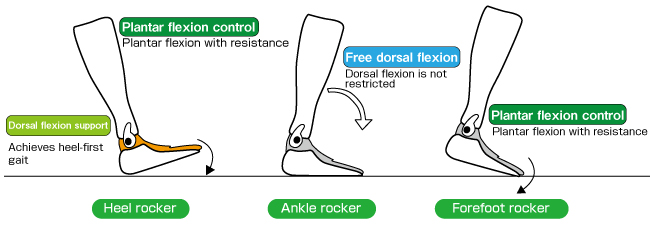
The hydraulic damper incorporated in GS does not generate restoring force unlike elastic body. GS generates a braking force only in the plantar flexion direction.
This provides smooth anterior movement of the body after the ankle rocker.
Technology 3: Adjustable braking force with a single tool
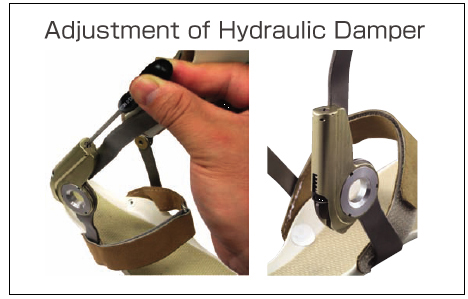
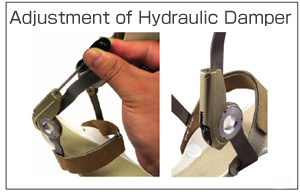 Adjustment of the hydraulic damper
Adjustment of the hydraulic damper
It is known that commonly-used shoehorn brace is difficult to adjust delicately because its braking force is adjusted with thickness and/or trimming of the material and it cannot be restored.
The braking force of GS is adjustable with a single tool while wearing the orthosis.
 Adjustment of the hydraulic damper
Adjustment of the hydraulic damperIt is known that commonly-used shoehorn brace is difficult to adjust delicately because its braking force is adjusted with thickness and/or trimming of the material and it cannot be restored.
The braking force of GS is adjustable with a single tool while wearing the orthosis.

 GaitSolution
GaitSolution


