












パシフィックニュース
T-Support使用による脳卒中片麻痺患者へのアプローチ②
装具
リハビリテーション

~私たちは患者様の歩行能力を限界まで引き上げることができているでしょうか~
中谷 知生(医療法人尚和会宝塚リハビリテーション病院・理学療法士)
2017-06-15
前回好評の『T-Support使用による脳卒中片麻痺患者へのアプローチ』2回目をお届けいたします。脳卒中片麻痺者の歩行能力を向上させるためのトレーニング理論を中心に解説は進んでいきます。その中でT-Supportの果たす役割とは・・・。
私たちは患者様の歩行能力を限界まで引き上げることができているでしょうか?
私は回復期病棟に入院中の脳卒中患者様の新しい歩行トレーニング法の開発に携わっており、現在最も興味のあることは、どうすれば下肢装具をより上手く使いこなし、治療効果を高めることができるのか、ということです。
近年、脳卒中片麻痺者の歩行トレーニングでは、より早期から適切な装具を用いることの重要性が認識されるようになりました。しかしその装具を使いこなす理学療法士が、治療用道具としての下肢装具の可能性、あるいは装具を装用した患者様の身体機能を限界まで引き出せているでしょうか?残念ながら多くの医療機関において、治療用の下肢装具が適切に使用されず、結果的に患者様の身体機能を最大限引き出せていない現状があると思います。
そこで第2回では、装具療法の治療効果を高めるために、現在私が歩行トレーニングにおいて重視しているいくつかの理論について簡単にまとめてみます。
脳卒中片麻痺者の歩行能力を向上させるために重視すべきポイントは
ヒトが歩くためには、歩行動作を成立させるための『神経機構』と、それに対応する『効果器』が必要です。このどちらが欠けても、歩くという行為は成立しないわけですから、これは車の両輪のようなもので、どちらが大事と断言することはできません。
では、歩行能力を向上させるための限られたトレーニング時間のなかで我々はどの部分を重視すべきでしょうか? ⇒ 右動画参照(https://youtu.be/m14J1_pPyEs)
この動画は名古屋工業大学の佐野先生が研究している、受動歩行ロボットというものです。受動歩行ロボットとは、制御システムや駆動装置を一切持たないロボットのことで、ヒトの歩行で例えるならば、神経機構を持たないけれども効果器だけで歩いている、という状態と言えます。近年の研究で、この歩行様式がヒトの歩行様式ととても良く似ている、ということがわかってきました。
ヒトの歩行に関する研究では、最終的にみられる効果器の運動は、必ずしも神経機構による制御がなくても可能である1)ことがわかっており、このことから私は、効果器、つまり筋・腱・骨などの使い方を工夫すれば、相当重度の運動麻痺があっても、片麻痺患者さんの歩行能力はもっと高いレベルを目指すことができると考えています。

歩行能力を向上させるために重視すべき筋力とは?
ただし、受動歩行ロボットとヒトの歩行には決定的な違いがあります。受動歩行ロボットには筋肉がないため、わずかに下り坂となった斜面を歩行することで前方への推進力を補っています。逆に言うと、下り坂以外では受動歩行ロボットは推進力を得られず、歩行を継続できません。そこでヒトの歩行では、前方への推進力の力源として、下肢の筋力が必要になります。
では片麻痺者が前方への推進力を得るために、最も重要なのはどこの筋でしょうか?先行研究では、片麻痺者の歩行速度の決定因子として、麻痺側下肢の股関節屈曲筋力と足関節底屈筋力が最も影響が強い2)としています。そのなかでも、私が装具療法を行う際に最も重視しているのが、足関節底屈筋力です。
なぜ足関節底屈筋力を向上させる必要があるの?
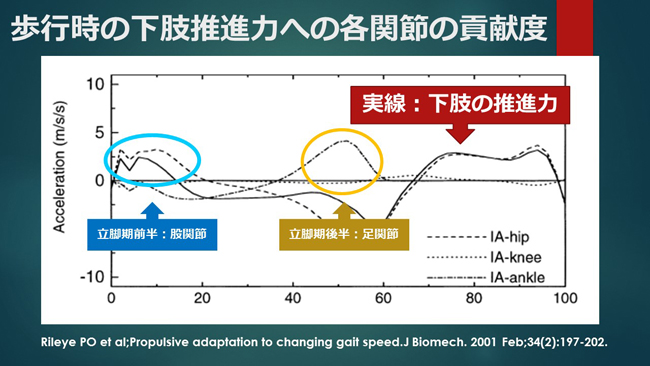
この図は、ヒトの歩行において股関節・膝関節・足関節、それぞれの関節がどのタイミングで前方への推進力の産生に貢献しているかについて調べたもの3)です。この研究では、立脚期後半では足関節の底屈運動が最も下肢の推進力に貢献していることがわかります。
脳卒中片麻痺者の歩行動作においても同様で、下肢の筋力を使って前方に進むには、足関節を底屈させる運動が最も重要である4)ことが明らかになっています。そして、歩行時の足関節底屈運動を強めるには、足関節底屈筋の活動量を増大させる必要がある5)のです。
どうやったら足関節底屈筋を鍛えられるの?
ではどうすれば足関節底屈筋力を鍛えることができるのでしょうか?慢性期脳卒中片麻痺者の歩幅と筋の関係についての研究7)では、非麻痺側のストライドを伸ばせば伸ばすほど、麻痺側の足関節底屈筋の筋活動が増大したことが明らかになっています。
足関節底屈筋を鍛えるには、より前型で歩く必要があるのです。
しかし、多くの片麻痺者にとって、前型で歩くということはなかなか難しい課題ではないでしょうか?
この動画は、当院にご入院しておられた70歳代の右片麻痺患者様です。 ⇒ 右動画参照

右下肢にはGait Solution Designを装着して前型歩行を行っていますが、立脚後期に膝関節が屈曲位となっています。
このように、多くの片麻痺者では前型にすればするほど、足関節には強い背屈モーメントが発生し、膝が曲がりやすくなるのです。
この問題を解決できるのが、T-Supportです。
この患者様がT-Supportを装着すると歩行動作が大きく変化します。
第3回ではその様子と、なぜT-Supporが効果を発揮するのかについて解説します。
1)樋口貴広・建内宏重(2015)『姿勢と歩行 協調からひも解く』三輪書店 p88-89
2)Analysis of the clinical factors determining natural and maximal gait speeds in adults with a stroke.Nadeau S, Arsenault AB, Gravel D, Bourbonnais D. . American Journal of Physical Medicine & Rehabilitatio 1999; 78(2): 123-130.
3)Rileye PO et al;Propulsive adaptation to changing gait speed.J Biomech. 2001 Feb;34(2):197-202
4)Carrie L. Peterson,et al:Leg extension is an important predictor of paretic leg propulsion in hemiparetic walking:Gait & Posture.2010; 32:451–456.
5)Sara J. Mulroy, Tara Klassen, JoAnne K. Gronley,Valerie J. Eberly, David A. Brown and Katherine J.Sullivan:Gait Parameters Associated With Responsiveness to Treadmill Training With Body-Weight Support After Stroke: An Exploratory Study.Physical Therapy 2010 90(2):209-23
6)Koji Ohata, Tadashi Yasui,Tadao Tsuboyama,Noriaki Ichihashi :Effects of an ankle-foot orthosis with oil damper on muscle activity in adults after stroke:Gait & Posture.2011; 33:102–107.
7)Clark DJ et al:Locomotor Adaptability Task Promotes Intense and Task-Appropriate Output From the Paretic Leg During Walking.Arch Phys Med Rehabil2016 Mar;97(3):493-6.

著者紹介
【経歴】
吉備国際大学 理学療法学科卒(2003年3月)
医療法人近森会 近森病院・近森リハビリテーション病院(2003~2008年)
医療法人尚和会 宝塚リハビリテーション病院(2008年~)
【その他学術実績】
認定理学療法士(脳卒中)
臨床歩行分析研究会 役員
日本神経理学療法学会 脳卒中ガイドライン作成部会 班員(2017年)
T-Supportの効果検証に関する学会発表 多数
第27回兵庫県理学療法学術大会にて学会長賞 受賞
第38回臨床歩行分析研究会定例会にて優秀講演賞 受賞
卒中八策・脳卒中後遺症者を上手く歩かせるための8つの方法
(2015年 運動と医学の出版社 電子書籍)
歩行補助具T-Support開発
(2016年 川村義肢株式会社と共同開発)
人気ブロガー【脳卒中の患者さんを上手く歩かせる方法を理学療法士が一生懸命考えてみた】でもあり、またセラピスト落語家 八軒家良法師 の側面も合わせ持つ。

中谷 知生先生(セラピスト落語家 八軒家 良法師)
関連情報
© 2017 Pacific Supply Co.,Ltd.
コンテンツの無断使用・転載を禁じます。
対応ブラウザ : Internet Explorer 10以上 、FireFox,Chrome最新版 、iOS 10以上・Android 4.4以上標準ブラウザ